 國家高速網路與計算中心
國家高速網路與計算中心
突破單一視角車輛追蹤限制 多攝影機協同系統開創智慧交通新紀元
數位科技與AI加速推動城市智慧化進程。由美國華盛頓大學黃正能教授主導、國網中心共同合作研究的「多目標多攝影機追蹤中的車輛追蹤系統」,運用深度學習與多攝影機協同技術,突破傳統車輛追蹤的限制,為智慧交通管理帶來重要進展。學術研究上也於國際間模式識別和計算機視覺領域的頂尖會議(The International Conference on Pattern Recognition, ICPR) 中Multi-Modal Visual Pattern Recognition Challenge #Track 1獲得冠軍。以本技術為延伸,雙邊共同合作研發的 「數位都市-智慧交通壅塞預警與警察勤務支援系統」(圖1) 更獲得2024年未來科技獎的榮譽。國網中心提供的運算資源與數據平台支援,不僅有效提升車輛追蹤的準確度與穩定性,也為未來智慧城市的交通管理建立創新典範。
傳統車輛追蹤系統多仰賴單一攝影機或車牌辨識技術,然而在實際應用上常面臨諸多限制。例如在覆蓋範圍受限、光線不足、車牌被遮蔽等情況下,追蹤準確度會大幅下降。此外,在多車輛同時出現、車流擁擠或車輛行為多變等複雜的交通環境下,單一攝影機的追蹤效果更顯不足。因此,開發一套能克服上述限制的多目標多攝影機追蹤系統,成為改善交通監控效能的重要課題。
「多目標多攝影機追蹤中的車輛追蹤系統」以新竹西濱快速道路上多支路口攝影機為影像來源(圖2),搭配先進的影像處理技術。系統運用深度學習模型中的卷積神經網路(CNN)偵測物體、擷取特徵,實現跨攝影機間的車輛追蹤與關聯。其創新之處在於多視角協同運作,有效解決單一攝影機的視野死角問題,尤其在車輛穿梭於不同攝影機覆蓋範圍時,系統可自動維持目標追蹤的連續性與身分識別一致性。此外,系統採用最新的深度學習演算法,不僅能準確區分相似外觀的車輛,更可依據即時交通流量自動調整追蹤策略,確保在複雜多變的路況中維持穩定的追蹤效能(圖3)。
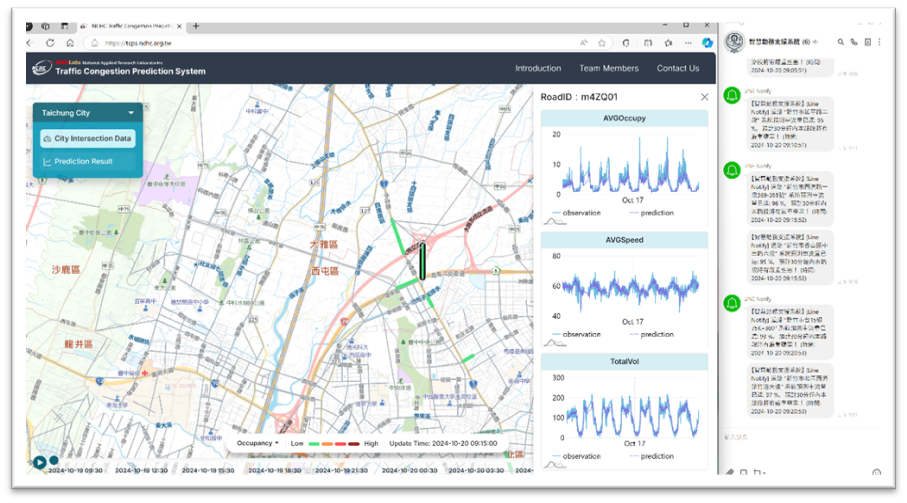
圖1、 數位都市-智慧交通壅塞預警與警察勤務支援系
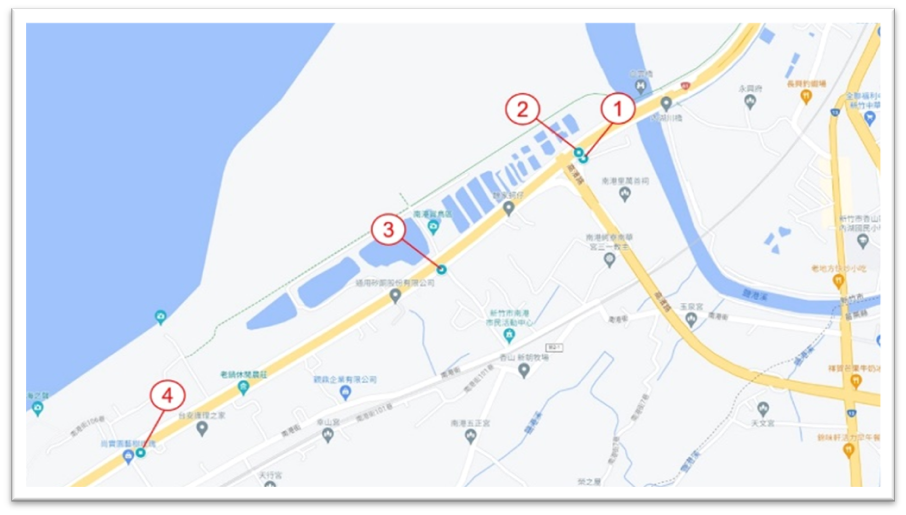
圖2、新竹市實驗場域

圖3、跨攝影機連續追蹤
在此計畫中,國網中心提供NVIDIA V100在內的高效能運算資源,協助處理大量即時影像資料,並支援深度學習模型的訓練與最佳化工作,如車輛偵測模型Yolov8與車輛特徵擷取模型ResNet的開發。此外,國網中心也提供完整的數據處理平台,整合多路攝影機的影像資訊,並透過可靠的雲端儲存與數據管理機制,確保系統運作的穩定性與效率。
對於「多目標多攝影機追蹤中的車輛追蹤系統」計畫的下一步,黃正能教授團隊將持續優化深度學習演算法,提升系統在複雜交通場景下的追蹤準確度。同時,也規劃擴大技術應用範疇,將系統導入視覺語言模型(Vision Language Models, VLM)的發展,提升電腦視覺處理能力,加快面對突發事件的快速反應機制,為台灣未來智慧城市的交通管理奠定重要基礎。
.jpg)